




ماژول نه محور IMU GY-951 از الگوریتمهای همجوشی حسگر، مانند فیلترهای کالمن یا فیلترهای مکمل، برای ترکیب دادههای چندین حسگر و ارائه تخمینهای حرکت و جهت گیری دقیقتر، استفاده کند.
برای اطمینان از اندازه گیری های دقیق، ماژول نه محور IMU GY-951 ممکن است نیاز به کالیبراسیون داشته باشد. کالیبراسیون شامل جبران انحرافات حسگر، حساسیت محوری متقاطع و سایر عواملی است که می تواند بر دقت اندازه گیری تأثیر بگذارد.
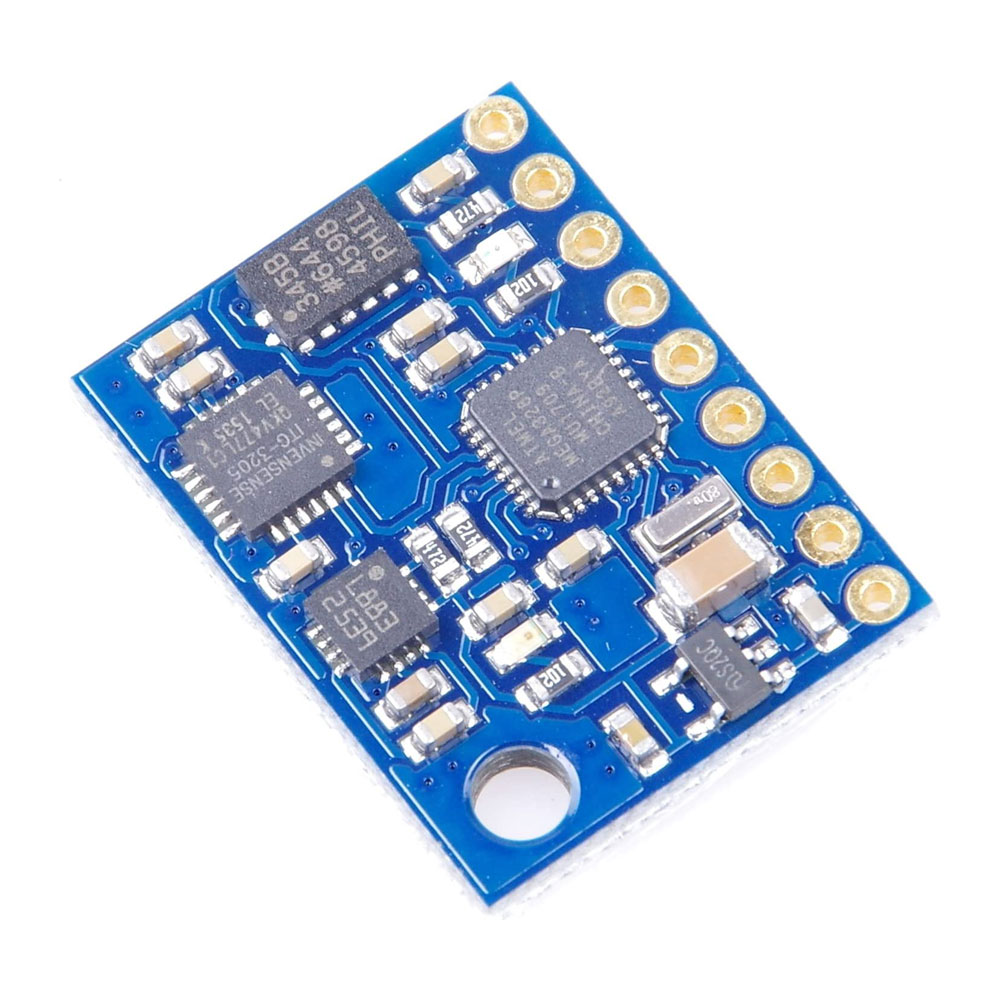
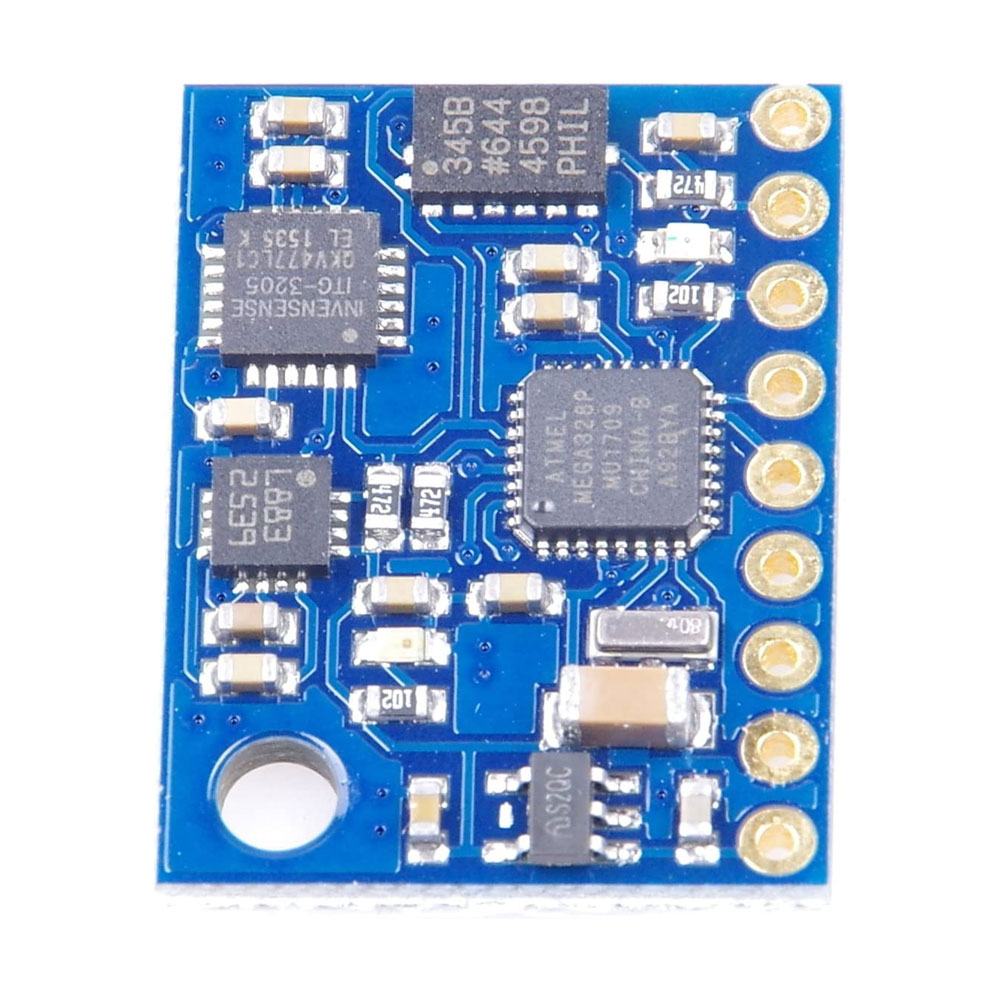
ویژگی ماژول نه محور IMU GY-951
نویزپذیری پایین
محدوده ولتاژ گسترده
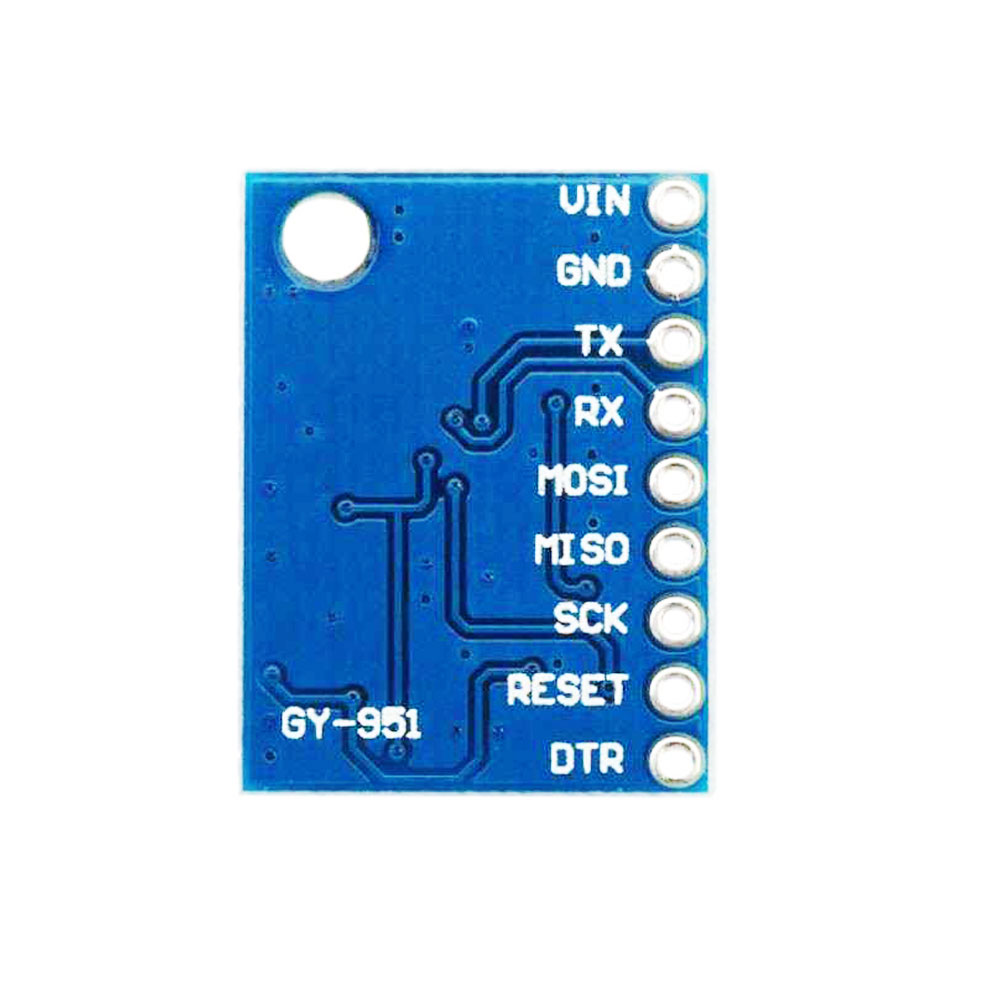
دارای خروجی دیجیتال
دارای یک سنسور دمای یکپارچه
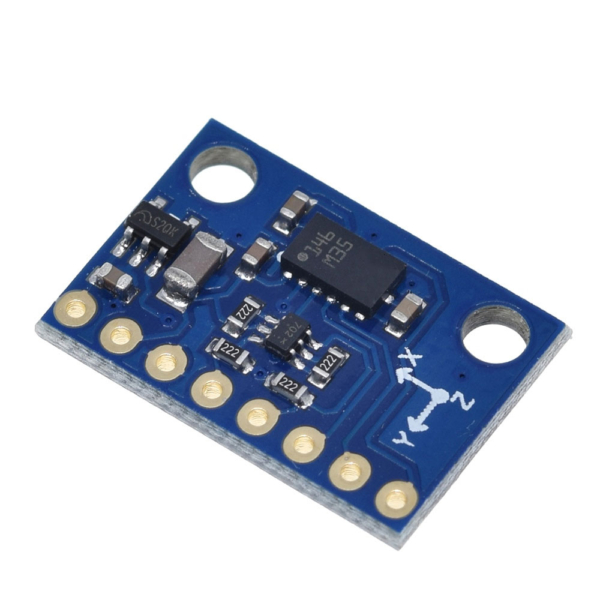
اندازه ی جمع و جور و وزن سبک
پشتیبانی از نرخ نمونه گیری قابل تنظیم
دارای یک شتاب سنج، ژیروسکوپ و مغناطیس سنج 3 محوره
سازگار با انواع میکروکنترلرها و بردهای توسعه مانند: AVR، آردوینو و …
دارای مکانیسم های جبران دما را برای کاهش اثرات تغییرات دما بر عملکرد سنسور
دارای پردازش داخلی برای ترکیب و فیلتر کردن دادهها و کاهش وظایف پردازشی را از میکروکنترلر
دارای امکان محافظت در برابر عوامل محیطی مانند شوک، لرزش و تداخل الکترومغناطیسی (EMI)
دارای خروجی های وقفه برای کنترل رویدادها یا هشدار به سیستم مختلف بر اساس شرایط یا آستانه
توانایی اندازه گیری تشخیص تغییرات کوچک در شتاب خطی، سرعت دورانی و قدرت میدان مغناطیسی
کاربرد ماژول نه محور IMU GY-951
نظارت و ردیابی در دستگاه های IoT
برای تثبیت و کنترل حرکت در سیستم های رباتیک
ساخت انیمیشن و تجزیه و تحلیل حرکات ورزشی در سیستمهای motion captur
در پروژه های تحقیق و توسعه مرتبط با سنجش حرکت، روباتیک، ناوبری و همجوشی حسگر
نظارت دقیق بر فعالیت بدنی، تشخیص ژست ها و ردیابی حرکات بدن در گچت های پوشیدنی
نظارت بر حرکات بیمار، ارزیابی الگوهای راه رفتن و ردیابی پیشرفت توانبخشی فیزیکی در توانبخشی
برای کنترل پرواز، تخمین نگرش ماژول GY-951 در وسایل نقلیه هوایی بدون سرنشین (UAV) و پهپادها
ردیابی حرکات سر، حرکات دست و حرکات بدن در سیستم های واقعیت مجازی (VR) و واقعیت افزوده (AR)
نظارت بر حرکت بازوهای رباتیک، تسمه نقاله و سایر ماشین آلات خودکار در سیستم های اتوماسیون صنعتی
اندازه گیری و تجزیه و تحلیل حرکات پوسته زمین، فعالیت های زمین ساختی و تغییر شکل های ساختاری در سیستم های نظارت ژئوفیزیکی برای پایش لرزه ای
مشاهده بیشتر 649 کیلوبایت
649 کیلوبایت

پرسش و پاسخ
هنوز بررسیای ثبت نشده است.