
میکروکنترلر AVR چیست ؟ کاربرد ها و انواع AVR
سلام از امروز قراره براتون بگیم میکروکنترلر AVR چیست ؟ و با کاربرد ها و...
هادی رحمتیدقیقه
مطالعه
1162

آموزش مقدماتی زبان c و c++ برای میکروکنترلر و آردوینو
در آموزش مقدماتی زبان c و c++ برای میکروکنترلر و آردوینو به بررسی توابع و...
هادی رحمتیدقیقه
مطالعه
1952
هجدهمین دوره بینالمللی مسابقههای ربوکاپ آزاد ایران
هجدهمین دوره بینالمللی مسابقههای ربوکاپ آزاد ایران فراتر از یک رقابت ورزشی، آزمایشگاهی پویا برای...
هادی رحمتی1465

معرفی انواع سیستم عامل های رزبری پای
رزبری پای یک کامپیوتر تک بردی قدرتمند و محبوب است که به واسطه تنوع و...
امیرحسین میرزاییدقیقه
مطالعه
3601
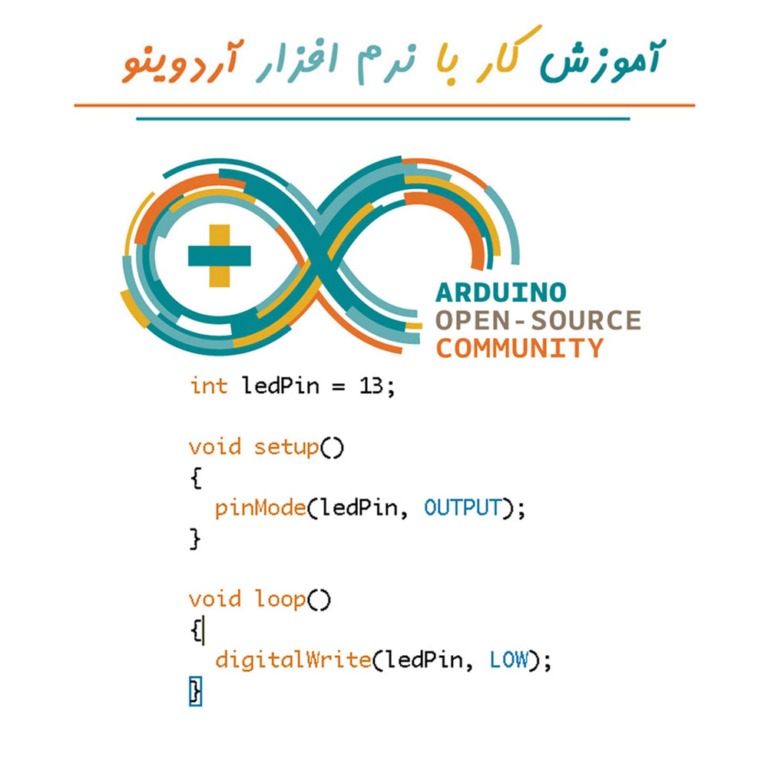
راه اندازی led با آردوینو
سلام خدمت مهندسین عزیز این آموزش راه اندازی LED با آردوینو به صورت کامل یاد...
هادی رحمتیدقیقه
مطالعه
4605
رزبری پای چیست و انواع رزبری پای
رزبری پای چیست رزبری پای یک کامپیوتر تکبردی کوچک و قدرتمند است که به دلیل...
امیرحسین میرزاییدقیقه
مطالعه
3903
ترانزیستور خانواده FET
در آموزش ترانزیستور خانواده FET و انواع آن می خواهیم بیشتر شماها را با ترانزیستور...
هادی رحمتیدقیقه
مطالعه
12659
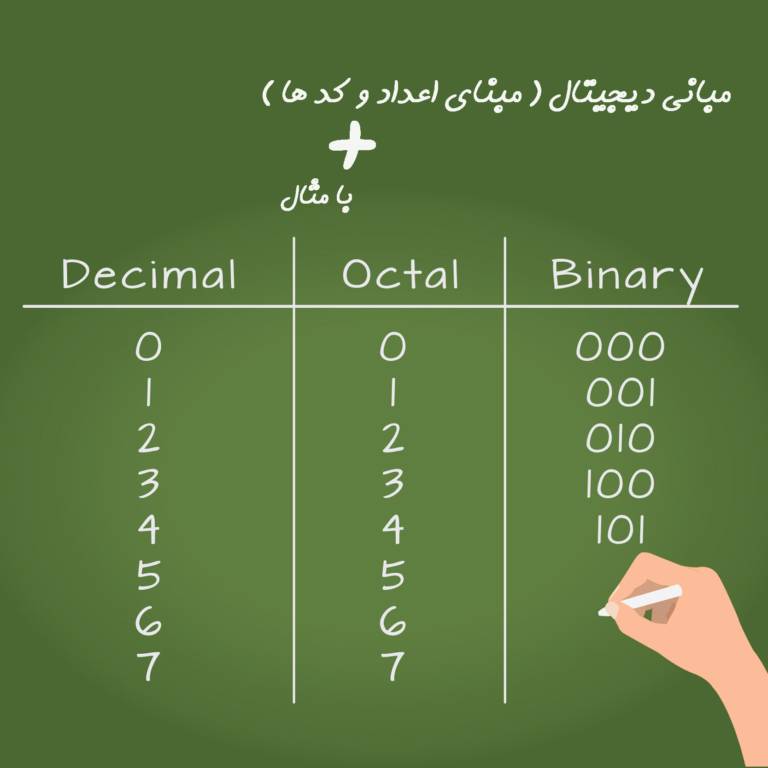
مبانی دیجیتال ( سیستم اعداد و کدها )
همین طور که میدونید الکترونیک از چندین بخش تشکیل شده که یکیش مبانی دیجیتال یا...
هادی رحمتیدقیقه
مطالعه
4560
ترانزیستور دو قطبی یا BJT
پس از ورود به دنیای الکترونیک لازم است شما با قطعات پر کاربرد و مهمی...
زهرا خلیل نژاددقیقه
مطالعه
14039
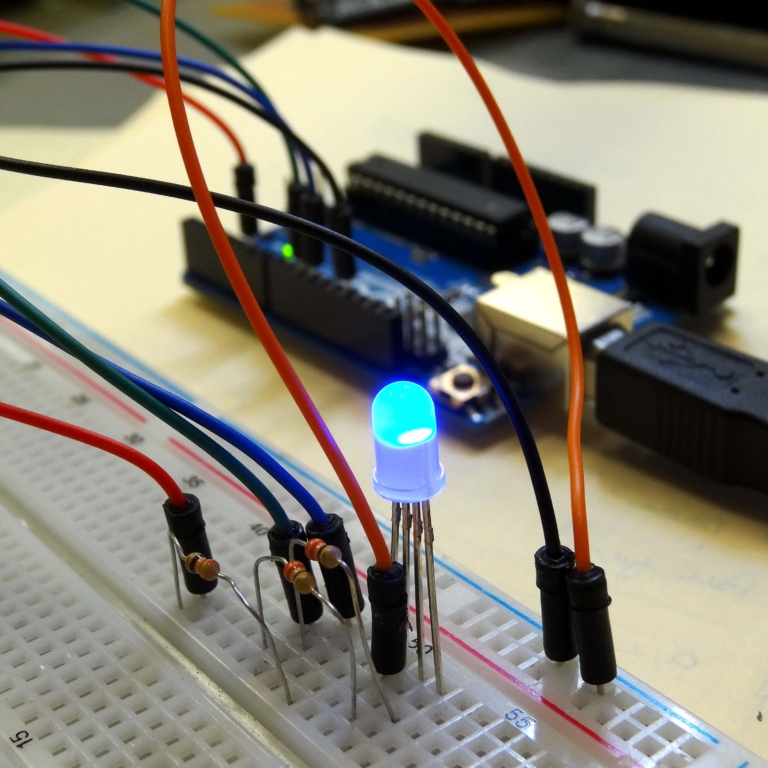
کنترل LED RGB با آردوینو
راه اندازی LED RGB با آردوینو هدف اصلی پروژه کنترل LED RGB با آردوینو ایجاد...
هادی رحمتیدقیقه
مطالعه
5549

آموزش راه اندازی LDR با آردوینو
در آموزش راه اندازی LDR با آردوینو شما یاد میگیرید که چطور یک فتوسل نوری...
هادی رحمتیدقیقه
مطالعه
5552
استفاده از IDE آردوینو
Arduino IDE یک نرم افزار منبع باز است که برنامه نویسان و سازندگان تجهیزات الکترونیکی...
هادی رحمتیدقیقه
مطالعه
13021
کاربر گرامی تعداد درخواستی شما برای این محصول از موجودی وارد شده در سایت بیش تر است برای سفارش این تعداد به صورت تلفنی با شماره زیر تماس حاصل فرمایید .